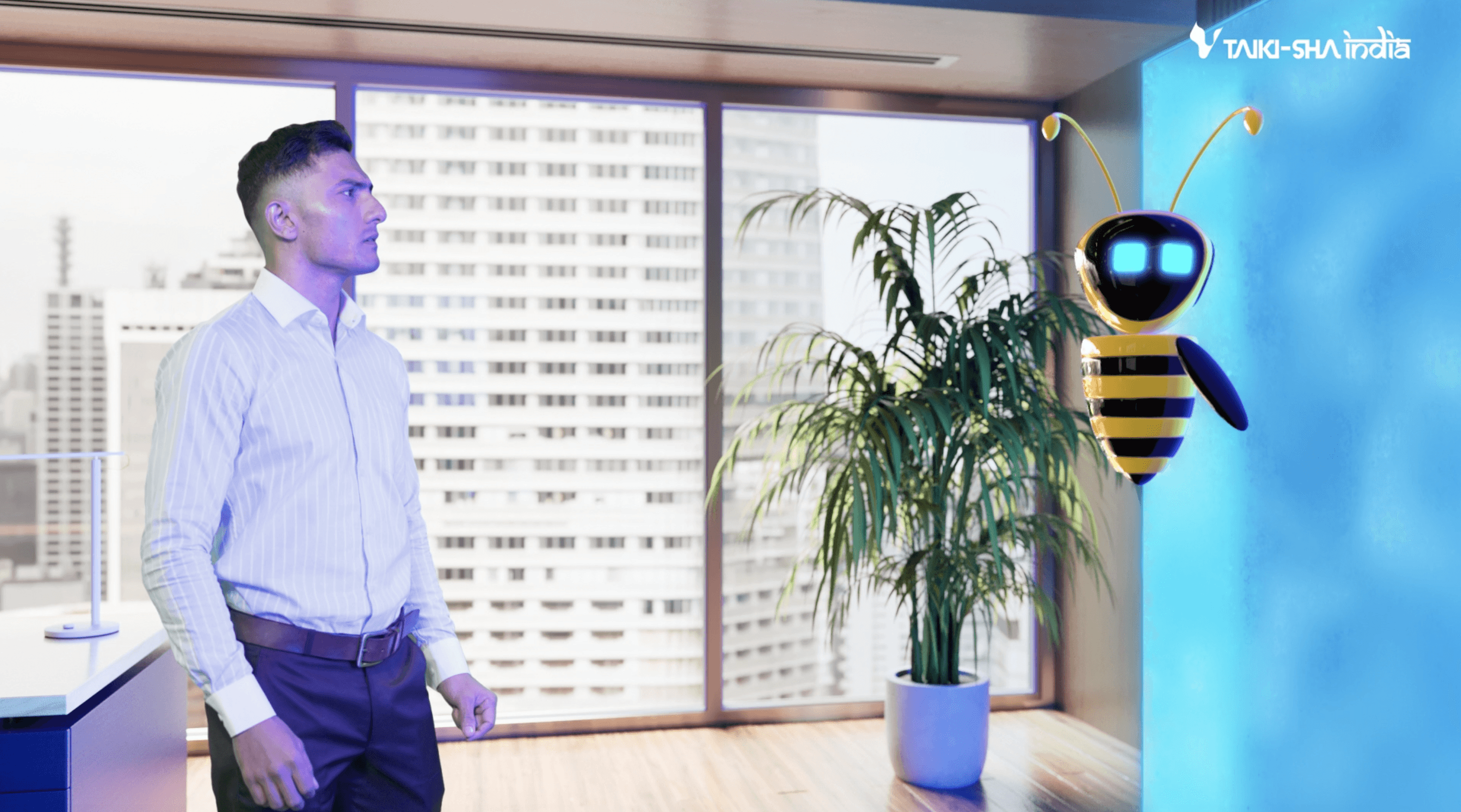
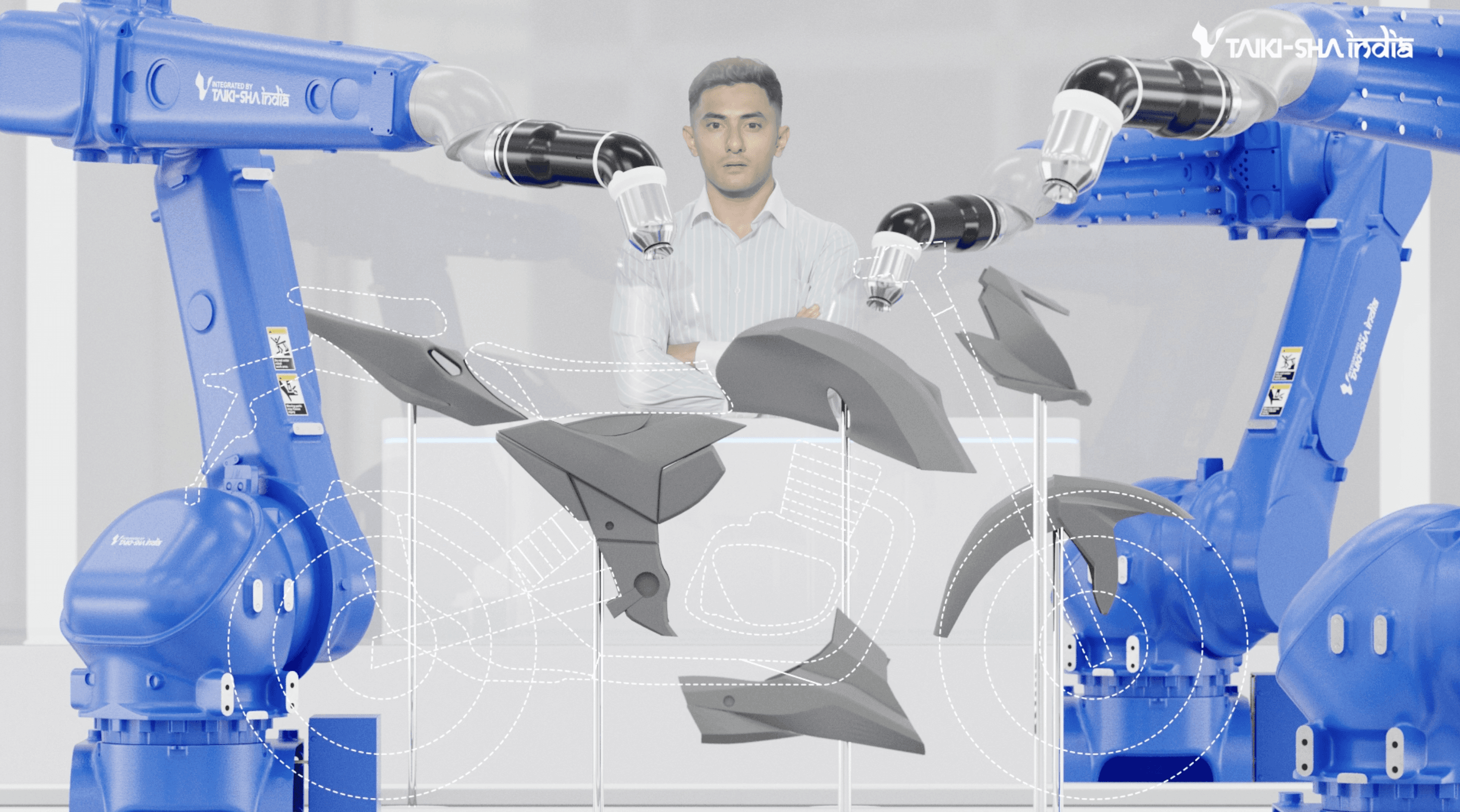
A hybrid framework combined live-action performance with CG robotic environments.
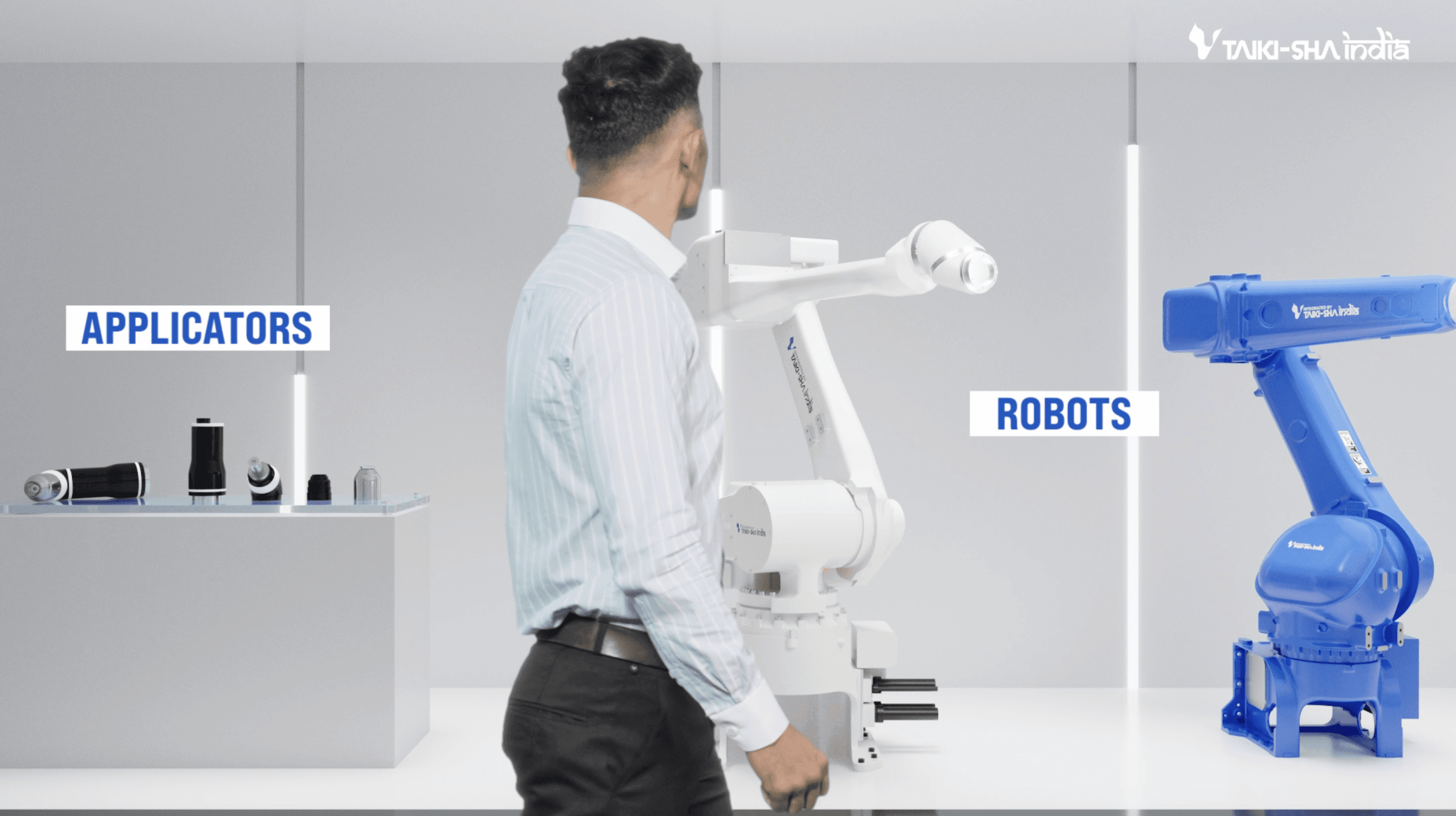
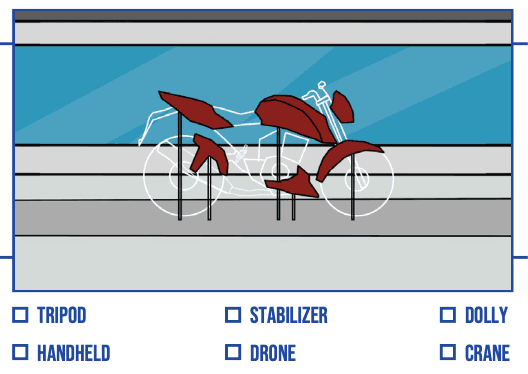
Robotic systems were developed from technical references and prior data, with rigging structured to replicate realistic articulation and operational sequencing. Mechanical movement logic was prioritised to ensure credibility for engineering audiences.
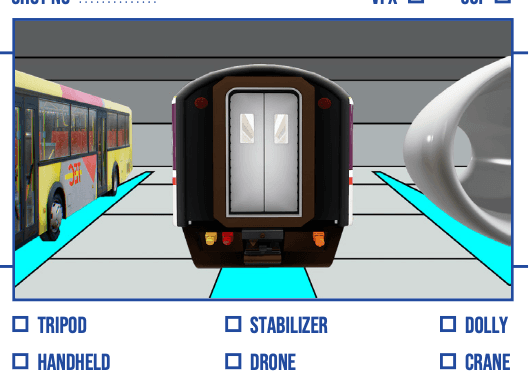
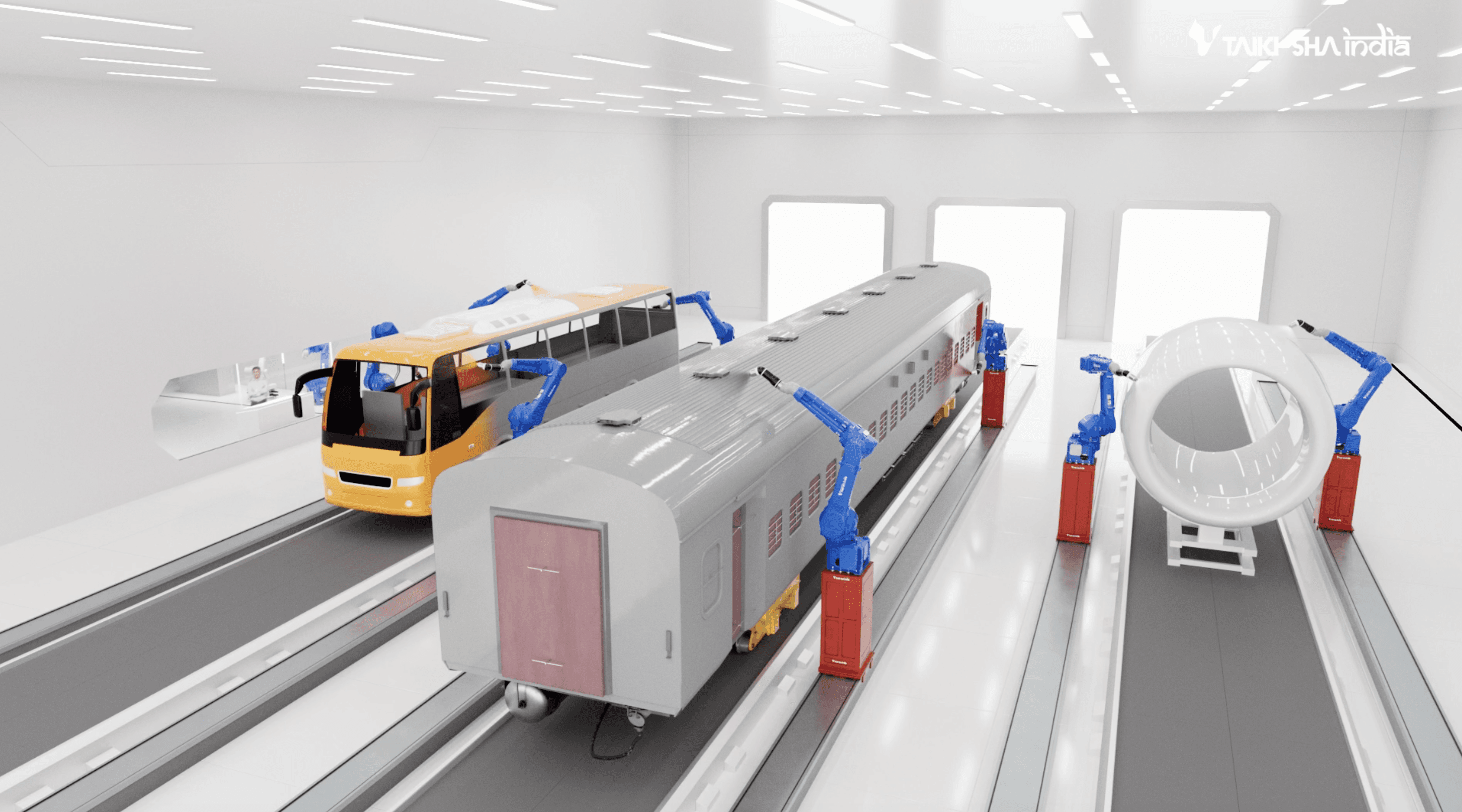
Instead of staging large physical deployments, environments were digitally constructed to control scale, lighting behaviour, and camera choreography. HDRI capture informed light replication, and material calibration ensured accurate metallic reflectivity and surface realism.
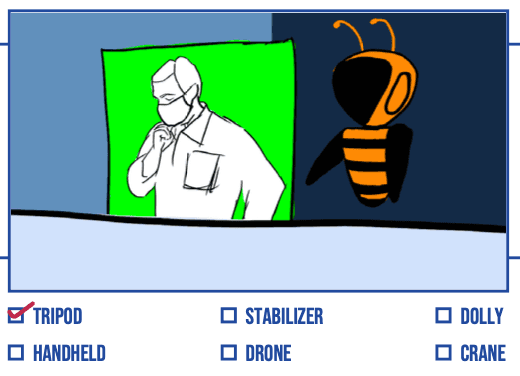
Chroma-shot live-action footage was composited into these engineered environments through structured tracking and integration workflows.
Rendering, compositing, and grading were executed within a disciplined pipeline to preserve continuity across layers.
Production operated with a compact team supported by staged client review cycles to maintain technical alignment without stalling progress.
The film presented robotics as an integrated automation ecosystem rather than isolated mechanical components.